Update: As of Arducopter 4.0.0 for Solo, the motor slew rate is available, and this mod is NOT required if you are happy to use slew rate.( which gives a little less responsive copter, lust like the original 3DR fix.)
3DR Solo Cube (Pixhawk 2.0) outputs 3.3v PWM, the IO buffers run off 3.3v on both sides, while they are perfectly capable of delivering 5v. Using 5v is safer when using 3DR Solo firmware with PWM slew rate, and required for ArduCopter code on Solo.
The simple solution is to purchase “Green cube” (usually sold out) or modify Pixhawk 2.1
The alternative solution, is to modify Solo’s Pixhawk 2.0 Cube.
This does require some soldering skills, and can be done by any semi-decent repair shop if you cannot do it yourself.
(The width of the buffer chip is 4.5mm)
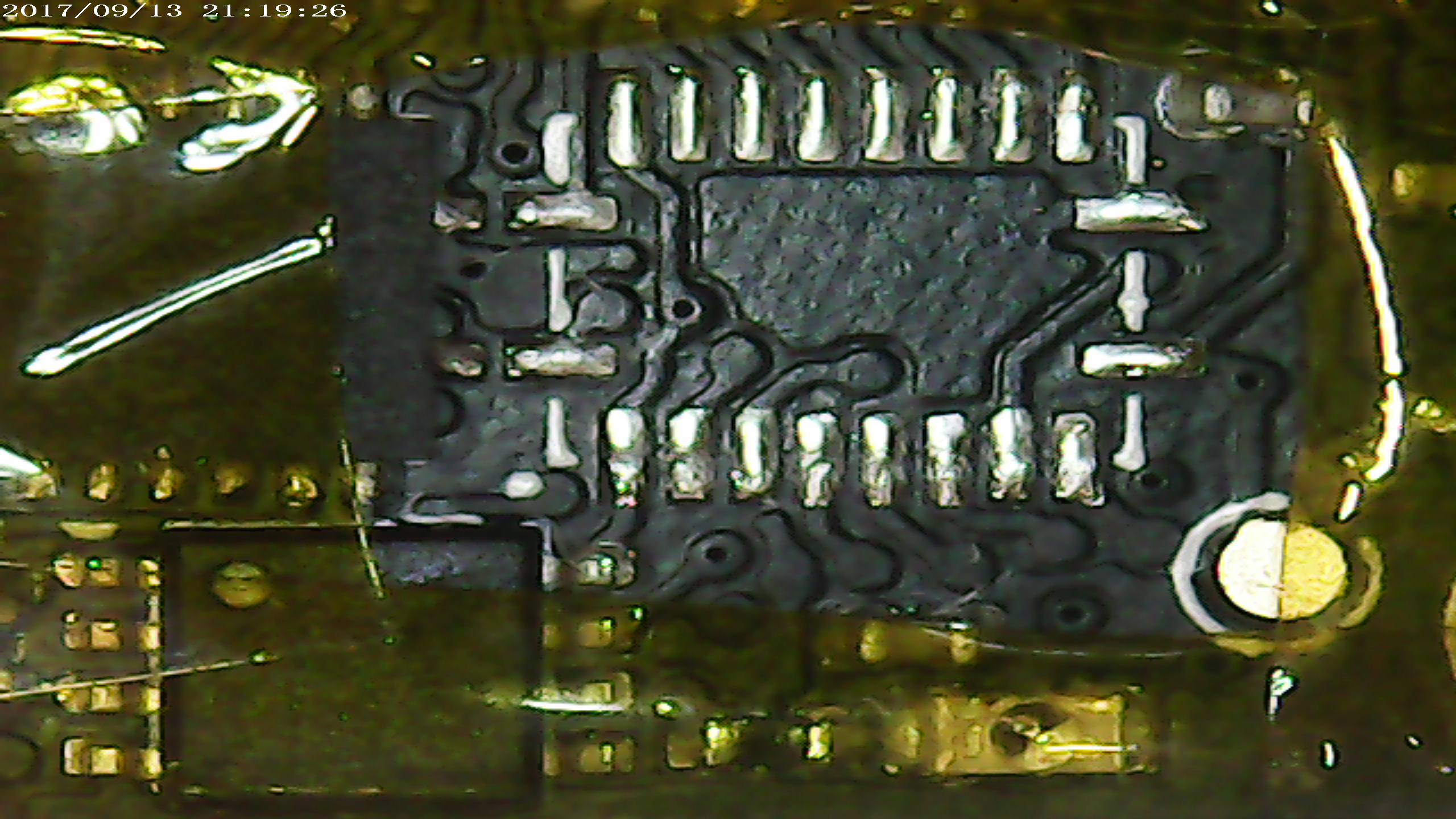
The two first images show two different PCB layouts of the Pixhawk 2.0 cube, so everybody should recognize, and stick to one 🙂
Open the cube, and locate the rightmost buffer ic. (TXS0108E marked YF08E)

Desolder the buffer (here seen on another PCB layout):
Cut the trace that feeds the upper left pad:

Re-solder the buffer:

Attach a thin wire to the pin. (provide 5v to the buffer’s VccB)

The other end of wires are routed to the clearly labelled 5v pad in the upper right corner of the Pixhawk2.0 :

Finally, clean and cover wire using conformal coating, to prevent vibrations to damage it: (UV inspection below)

Congratulations, output 1…8 output is now 5v.
Final note: the UV inspection picture picture shows another buffer, not used for PWM, the photos are taken on different occasions, and while batch processing many, not only one, so the time is not 30minutes between desolder and resoldering one device as timestamp may suggest.
Should you use a professional to do this job, it should take <15 minutes.
Modified files for uploading using Solex (Just copy into /Solex/download/package) – The only modification is to make Solex ignore the fact that the modified cube still runs the old 3DR fork of ArduCopter.
Once you upgrade to the 3.5.2 I provided here, you can continue to upgrade to newer versions using SSH /Solex and/or OpenSolo as if you had the greeen cube.
(2) Wipe Pixhawk Firmware for 5v mod
(3) ArduCopter 3.5.2 Firmware for 5v mod
(There is nothing special with the ArcuCopter build itself, only the )